
The extent to which an object resists rotational acceleration about a particular axis is captured by a quantity called Moment of Inertia.
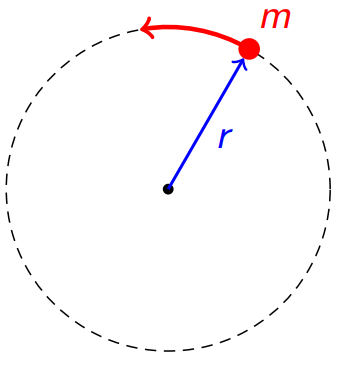
The Moment of Inertia (MOI) of a point mass 


The principle of superposition states that the MOI of a group of point masses is the sum of their individual MOIs. For 

What is the purpose of computing the moment of inertia, and why is it important/relevant in dynamics?
The kinetic energy of a particle in linear motion is

where 
From rotational dynamics, 


This looks like a rotational version of 



Example – A thin rod (central axis)
We can find the MOI for a thin rod of mass 

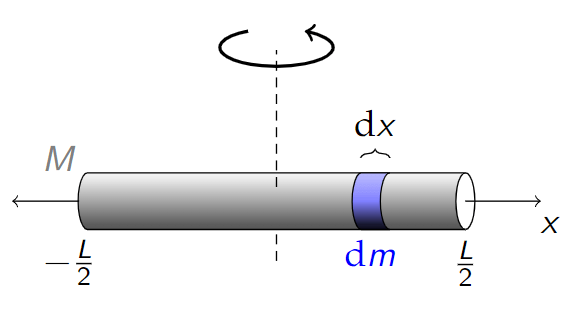
For a continuous volume 

where 


Calculating this integral gives the MOI,

We notice the MOI is proportional to the mass, but also the length squared.
Example – A thin rod (medial axis)
What about finding the MOI for the same thin rod, rotated about a perpendicular axis at one end of the rod?
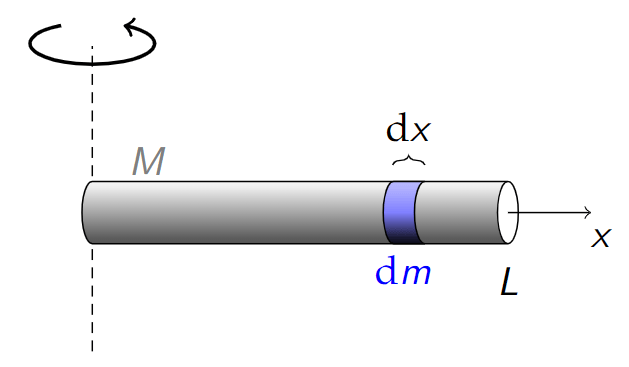
Now the integral becomes

Calculating this integral gives the MOI,

Note that this result is larger than the previous result. This makes sense given our interpretation of the MOI as rotational inertia. It is easier to turn a rotating door than a standard door of the same mass, since more of the mass is clustered around the axis of rotation.
Example – A thin ring
Consider finding the MOI of a thin ring of mass 
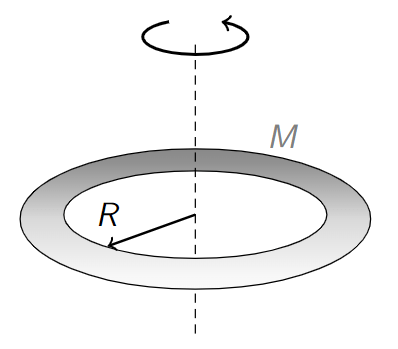
This is easily calculated from the definition,

So

Example – A thin disk
Let’s now find the MOI of a thin disk of mass
We first consider an elemental ring of radius 

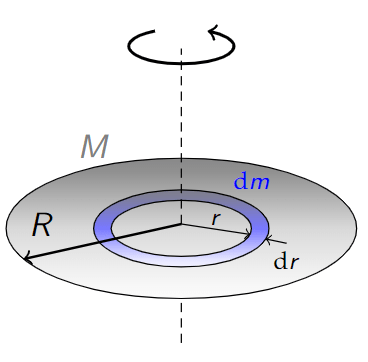
Using our previous result, the MOI of the elemental ring is

By summing infinite elemental rings, we can compute the MOI of the whole disk,

The final result is

Note that this is half that of the result for a ring of the same mass and radius.
Check out this short video in which a disk and a ring race down an inclined plane. Which one do you think will win?
The mass of the disk being more uniformly distanced from the axis of rotation means that the disk is has less rotational inertia than the ring, and thus wins the race.
Example – A sphere
Calculating the MOI for spheres takes a little more work, however the results tell the same story. The MOI for a sphere of mass $M$ and radius $R$ is

The MOI for a hollow spherical shell of mass $M$ and radius $R$ is

Now consider our race from Part I of this series.
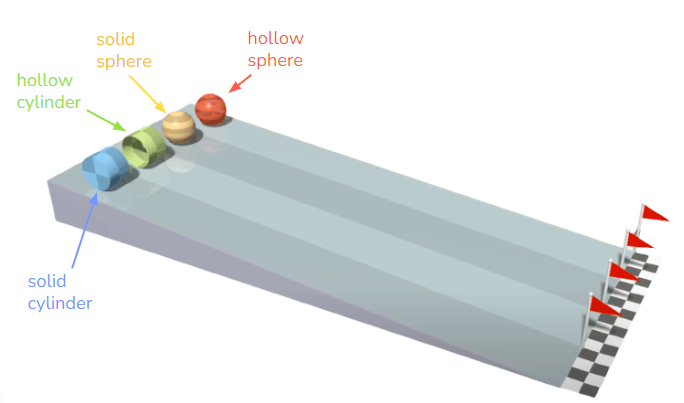
All of these objects have the same mass and radius, and we are effectively asking the question – which of these objects are best at overcoming their rotational inertia, or in other words, which object has the lowest moment of inertia?
Since the masses and radii are the same, all the moments of inertia are of the form

we can simply compare the values of 
Note that since only the cross-sectional area is relevant, we can use the ring example for our hollow cylinder, and the disk example for the solid cylinder. Laying out the results again, from lowest MOI to highest, we see




which explains finally the results of our race.
In the next post we will present some important therorems we can use to find the moment of inertia of more complex, composite objects.

Leave a comment